Landman Robotics Projects
Robotic Arm
To better understand our Robotic Arm project, refer to the Robot Concepts on our home page.
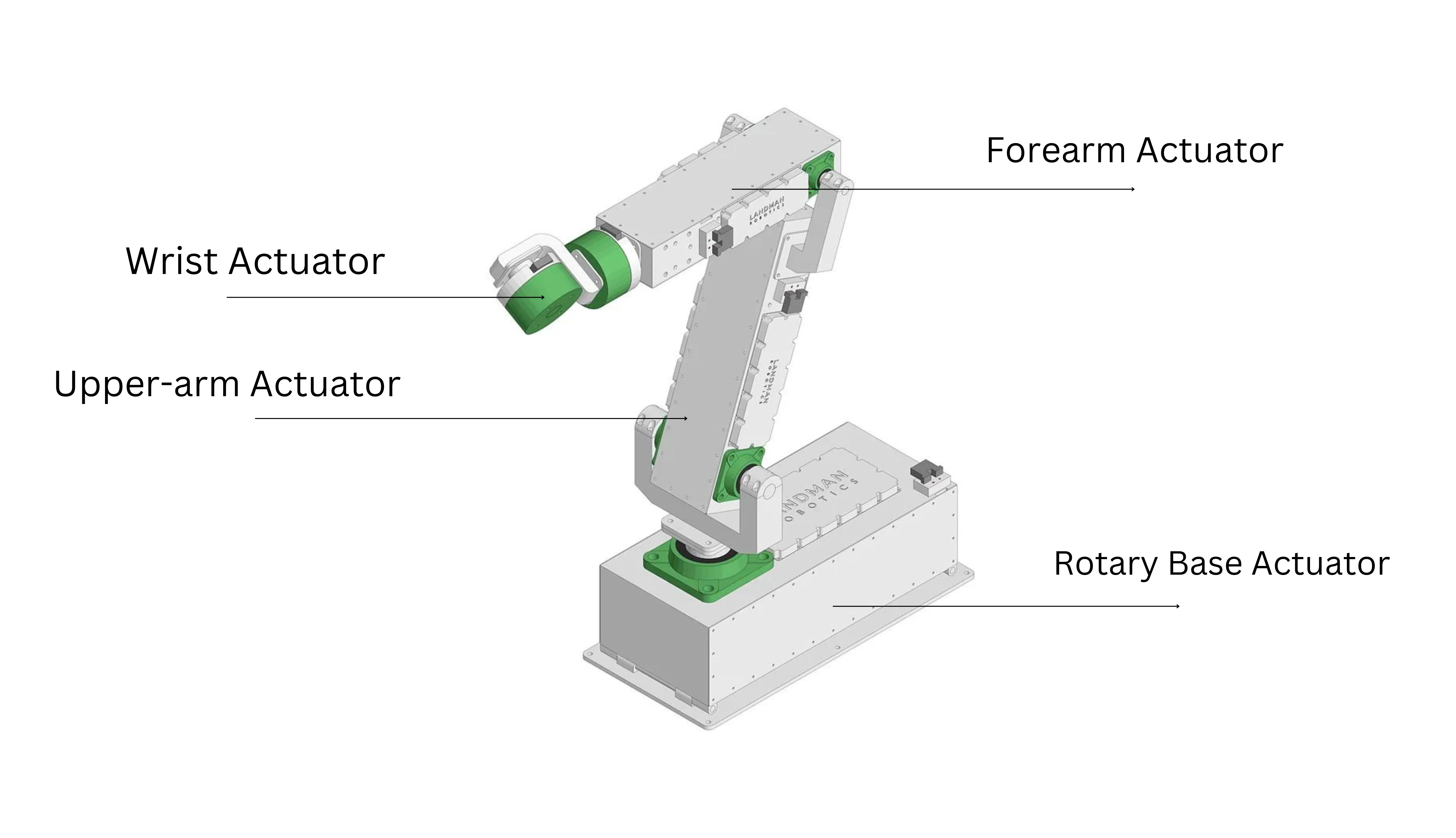
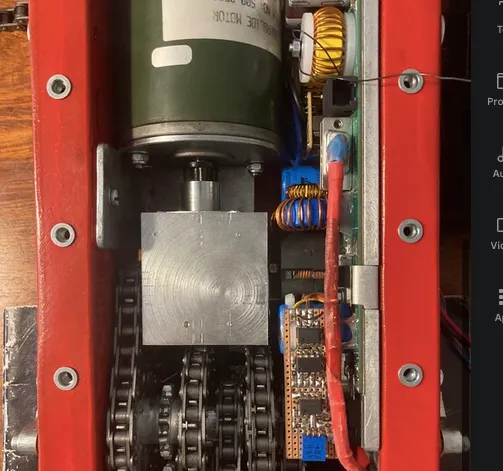
A robotic arm is a system comprising out of a series of Major Components (MC's) working together in unison to execute a specific task. Our robotic arm can be subdivided into 4 MC's namely the Wrist Actuator (WA), Forearm Actuator (FA), Upper-arm Actuator (UAA) and the Rotary Base Actuator (RBA). We are in the process of designing and developing all four of these MC's. We have already produced a working prototype of the FA (ADM3) and proved in a series of test that FA (ADM3) complies with our strict baseline specification as stipulated in the Forearm Actuator project section.
Developing the other MC's, will be a relatively straight forward task. It will entail a simple repackaging exercise of the MC developed by us in the FA project. In short, the work executed in developing the FA will be extended to include a WA, UAA and RBA to form our first complete Robotic Arm. This work we estimate will start beginning of 2025.
Ultimately, we would like to produce a range of low cost robotic arms capable of payloads in the range 1 to 500 kg and reach in the range 1 to 10 meter. Naturally, we will use the MC developed in-house as this would drastically reduce costs and result in a series of low cost robotic solutions.
Projects Include
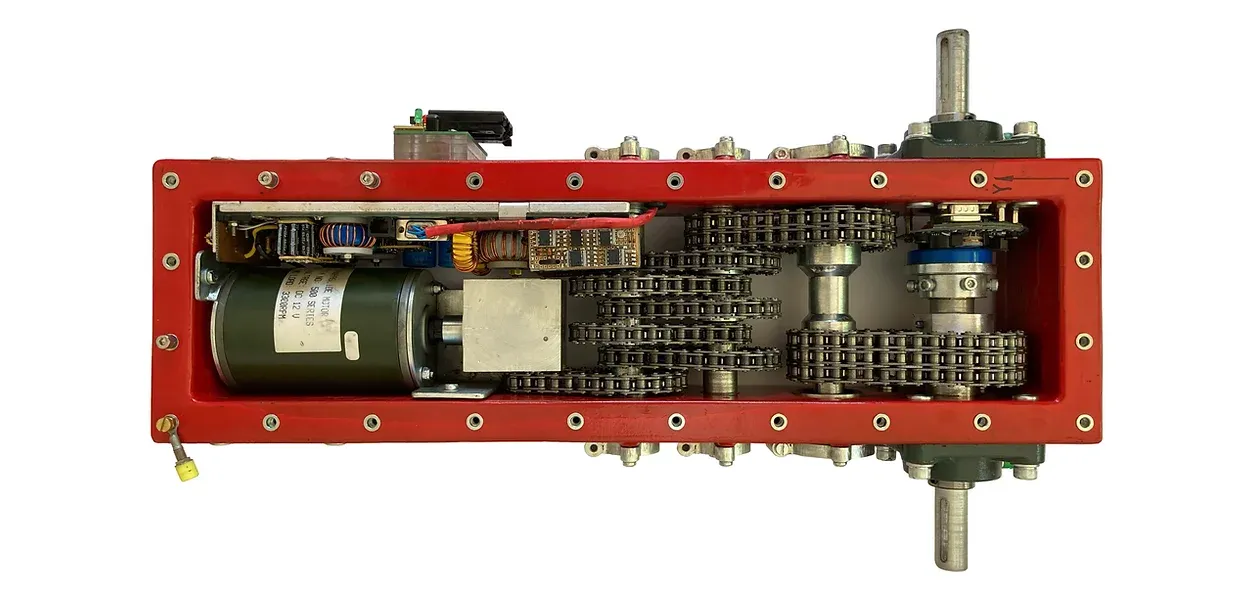
Forearm Actuator
Our quest to design and develop an affordable medium size industrial robotic arm resulted in the following baseline requirements:
The MFEA Encoder
For our robotic arm to work effectively, a rotary encoder had to be found. A baseline specification for such an encoder was established by compiling a system error budget of which the rotary encoder forms part.
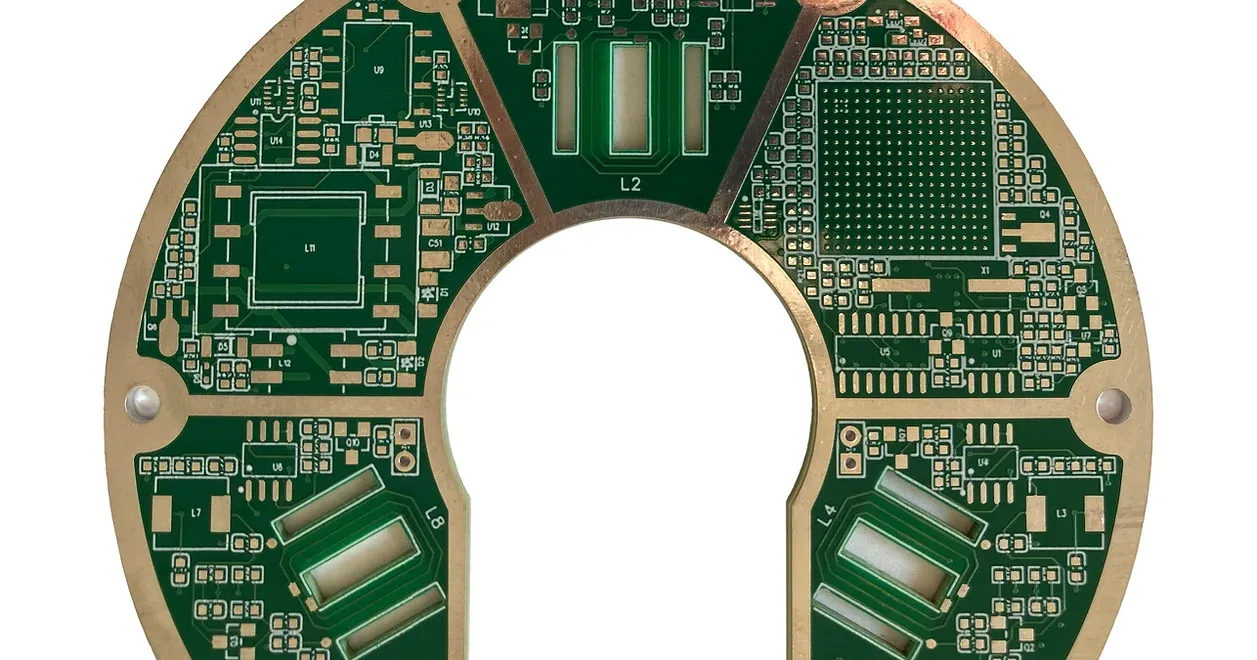
Actuator Controller Card
We have developed a working prototype of the Controller Card used in the Forearm Actuator. This Major Component is common to the other kinematic elements of the Robotic Arm.
Requirement Management Tool
Landman Robotics is well versed in the systems engineering process and associated tools such as simulation, model based design and requirements management.
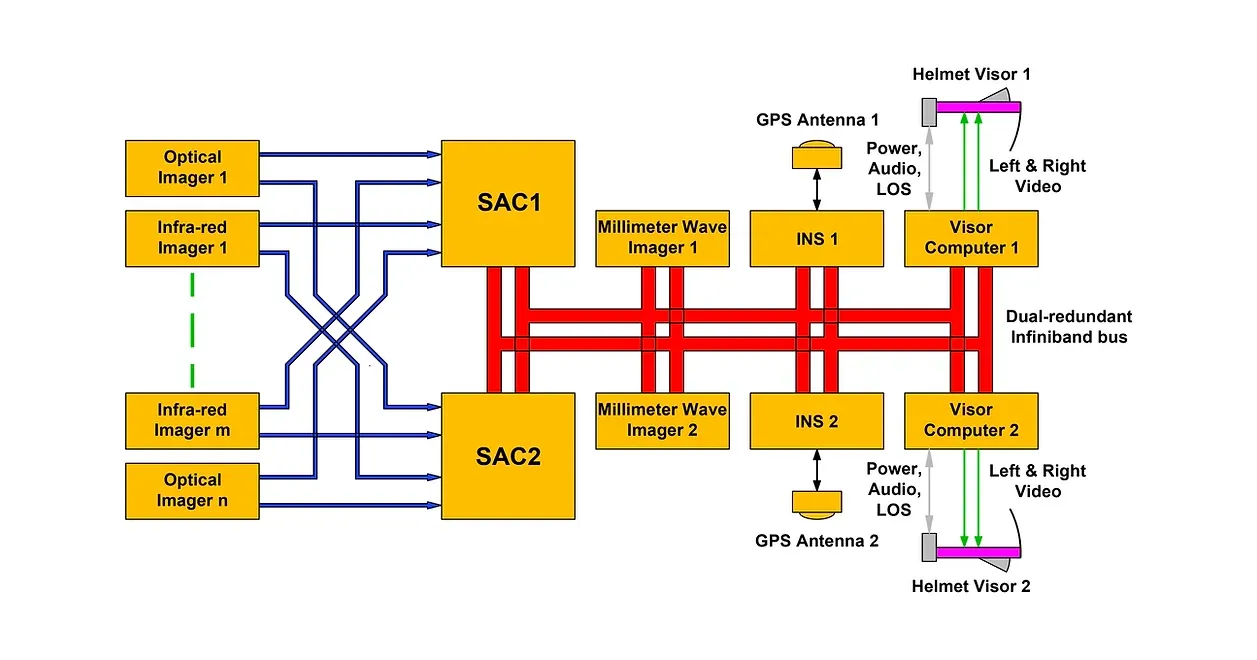
Inclement Weather Operations System (IWOS)
One of the projects Dr Landman was involved in before the formation of Landman Robotics was a so-called Inclement Weather Operations System (IWOS).